컨볼루셔널 뉴럴 네트워크
NOTE: 이 튜토리얼은 텐서플로우에 능숙한 사용자를 대상으로 하며, 기계학습에 대한 전문 지식과 경험을 갖고 있다는 전제로 쓰였습니다.
개요
CIFAR-10 분류는 기계학습에서 흔히 사용되는 벤치마크 문제입니다.
이 분류 문제는 RGB 32x32 픽셀 이미지를 다음의 10개 카테고리로 분류하는 것이 목표입니다 :
비행기, 자동차, 새, 고양이, 사슴, 개, 개구리, 말, 배, 트럭.
더 자세한 설명을 원하신다면 CIFAR-10 페이지와 Alex Krizhevsky의 기술 보고서를 참조하세요.
목표
이 튜토리얼의 목표는 이미지를 인식하는 상대적으로 작은 [컨볼루셔널 뉴럴 네트워크]를 만드는 것입니다. 이 과정에서, 튜토리얼에서는
- 네트워크 구조와 학습 및 평가의 표준적인 구성에 주목하고,
- 더 크고 복잡한 모델에 대한 예제를 제공합니다.
CIFAR-10 분류가 선택된 이유는 더 큰 모델을 다루는 데에 필요한 텐서플로우의 많은 기능들을 연습하기에 충분히 복잡하기 때문입니다. 그와 동시에, 충분히 작은 모델이기 때문에 학습이 빨라 새로운 아이디어를 적용해보거나 새로운 테크닉을 실험해보기에 적합하기 때문입니다.
튜토리얼의 주안점
CIFAR-10 튜토리얼은 텐서플로우로 더 크고 복잡한 모델을 디자인하기 위한 몇몇의 주요 구성들을 설명합니다.
주요 수학적 요소 : Convolution (wiki), rectified linear activations (wiki)), Max Pooling (wiki) and local response normalization (Chapter 3.3 in AlexNet paper).
활성화(Activations)와 경사(gradients)의 손실(loss) 및 분포와 입력된 이미지를 포함하는 학습 중인 네트워크의 활동 시각화
학습된 변수의 이동 평균(moving average)을 계산하는 방법과 평가를 할 때 예측 성능을 향상시키기 위하여 이 평균들을 이용하는 방법
체계적으로 시간에 따라 감소하는 학습 비율(learning rate) 스케쥴의 구현
디스크 지연과 비싼 이미지 전처리를 모델로부터 분리하기 위한 입력 데이터 큐의 선인출(prefetching)
또한 저희는 모델의 다중-GPU 버전을 제공합니다. 이 모델은 다음과 같은 사항들을 설명합니다:
- 다수의 GPU 카드에서 병렬로 훈련할 모델을 구성하기
- 다수의 GPU 간에 변수들을 공유하고 업데이트하기
우리는 이 튜토리얼이 TensorFlow로 영상(vision) 작업에 필요한 큰 CNN을 구축하기 위한 시발점이 되었으면 합니다.
모델 구조
CIFAR-10 튜토리얼의 모델은 컨볼루션과 비선형이 교차되어있는 다중 레이어 구조로 구성되어 있습니다. 이 레이어들 뒤로는 Softmax 분류기로 이어지는 Fully connected layer가 있습니다. 상위 몇몇 레이어를 제외하고, 이 모델은 Alex Krizhevsky가 만든 모델을 따르고 있습니다.
이 모델은 GPU에서 몇시간의 학습을 거친 후 최대 86%의 정확도를 달성하였습니다. 좀더 자세한 사항은 아래와 코드를 참조하세요. 이 모델은 1,068,298개의 학습 가능한 매개변수로 구성되어 있으며, 단일 이미지를 추론하는 데에 19.5M의 곱셉-덧셈 연산이 필요합니다.
코드 구성
이 튜토리얼의 코드는
tensorflow/models/image/cifar10/ 에 있습니다.
| 파일 | 목적 |
|---|---|
cifar10_input.py |
CIFAR-10 바이너리 파일 포맷을 읽어들입니다. |
cifar10.py |
CIFAR-10 모델을 만듭니다. |
cifar10_train.py |
CIFAR-10 모델을 CPU 혹은 GPU로 학습합니다. |
cifar10_multi_gpu_train.py |
CIFAR-10 모델을 다중 GPU로 학습합니다. |
cifar10_eval.py |
CIFAR-10 모델의 예측 성능을 평가합니다. |
CIFAR-10 모델
CIFAR-10 네트워크는 주로 'cifar10.py'에 들어있습니다. 전체 훈련 그래프는 약 765개의 연산을 포함합니다. 우리는 아래의 모듈들로 그래프를 구성하는 것이 가장 재사용성이 높은 코드를 만드는 방법임을 알게 되었습니다:
모델 입력: 'inputs()' 와 'distorted_inputs()'는 각각 평가와 훈련을 위한 CIFAR 이미지를 읽고 전처리를 하는 연산들을 추가합니다.
모델 예측: 'inference()'는 추론을 수행하는 연산들을 추가합니다. 예) 제공된 이미지에 대한 분류
모델 훈련: 'loss()'와 'train()'은 손실(loss)과 경사(gradients), 변수 업데이트와 시각화 요약을 계산하는 연산들을 추가합니다.
모델 입력
모델의 입력 부분은 CIFAR-10 바이너리 데이터 파일로부터 이미지를 읽는 'inputs()'와 'distorted_inputs()'
로 구성되어 있습니다.
이 데이터 파일들은 고정 바이트 길이 레코드를 담고있어, 우리는 tf.FixedLengthRecordReader를 사용합니다.
'Reader' 클래스가 어떻게 작동하는지 더 알고 싶으시다면 Reading Data를 참조하세요.
이미지들은 아래의 과정을 통하여 처리됩니다.
훈련을 위하여 추가적으로 일련의 무작위 왜곡을 적용하여 인공적으로 데이터 셋의 크기를 키웁니다:
가능한 왜곡의 목록은 Images 페이지를 참조하세요.
또한 image_summary를 이미지에 붙여
TensorBoard에서 시각화 할 수 있도록 하였습니다.
이는 입력이 제대로 만들어 졌는지 확인하기 위한 좋은 연습이 될 것 입니다.

디스크에서 이미지를 읽고 왜곡을 하는 것은 적지 않은 양의 처리 시간이 필요할 수 있습니다. 이러한 작업이 훈련을 늦추는 것을 방지하기 위해, 우리는 이 작업을 16개의 독립된 스레드로 나누어 실행시킵니다. 이 스레드는 TensorFlow 큐를 계속해서 채웁니다.
모델 예측
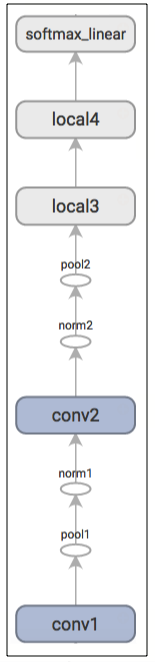
모델의 예측 부분은 'inference()' 함수로 구성되어 있습니다. 이 함수는 예측의 로짓(logit)들을 계산하는 연산을 추가합니다. 모델의 해당 부분은 다음과 같이 구성되어 있습니다:
| 레이어 명 | 설명 |
|---|---|
conv1 |
컨볼루션(convolution) 과 정류된 선형(rectified linear) 활성화 레이어. |
pool1 |
최대 풀링(max pooling) 레이어. |
norm1 |
지역 반응 정규화(local response normalization) 레이어. |
conv2 |
컨볼루션(convolution) 과 정류된 선형(rectified linear) 활성화 레이어. |
norm2 |
지역 반응 정규화(local response normalization). |
pool2 |
최대 풀링(max pooling) 레이어. |
local3 |
정류된 선형 활성화가 포함된 완전 연결 레이어(fully connected layer with rectified linear activation). |
local4 |
정류된 선형 활성화가 포함된 완전 연결 레이어(fully connected layer with rectified linear activation). |
softmax_linear |
로짓(logit)들을 생산하는 선형 변환(linear transformation) |
아래의 그래프는 TensorBoard를 통해 생성된 추론(inference) 연산을 설명합니다.
연습: '추론(inference)'의 출력값은 정규화되지 않은 로짓(logit)입니다.
tf.nn.softmax()을 사용하여 정규화된 예측값을 리턴하도록 네트워크 구조를 수정해보세요.
'inputs()'와 'inference()' 함수는 모델을 평가하는데 필요한 모든 컴포넌트들을 제공합니다. 이제 우리는 모델을 훈련하는 작업을 구축하는 것으로 초점을 옮겨봅시다.
연습: 'inference()'의 모델 구조는 cuda-convnet 에서 명시하는 CIFAR-10 모델과 조금 다릅니다. 특히, Alex의 원본 모델의 최상위 레이어는 완전 연결(fully connected)이 아니라 국소 연결(locally connected) 되어있습니다. 최상위 레이어에서 국소 연결(locally connected) 구조를 정확하게 재현하도록 구조를 수정해보세요.
모델 훈련
N-way 분류를 수행하는 네트워크를 훈련시키는 일반적인 방법은 소프트맥스 회귀(Softmax regression)로 알려진 다항 로지스틱 회귀(multinomial logistic regression)입니다. 소프트맥스 회귀(Softmax regression)는 네트워크의 출력값에 softmax 비선형성을 적용하고, 정규화된 예측값과 1-핫 인코딩(1-hot encoding)된 라벨 사시의 크로스 엔트로피(cross-entropy)를 계산합니다. 균일화(regularization)를 위하여, 우리는 모든 학습된 변수에 대하여 일반적인 가중치 감소(weight decay) 손실을 적용합니다. 모델의 목적함수는 크로스 엔트로피 손실의 합과 'loss()' 함수에 의해 리턴되는, 모든 가중치 감소(weight decay) 텀의 합입니다.
우리는 TensorBoard의 scalar_summary를 사용하여 이를 시각화 하였습니다.

우리는 표준적인 경사 강하(gradient descent) 알고리즘 (다른 방법을 보려면 Training을 참조)을 사용하여 모델을 훈련합니다. 시간에 따라 급격하게 감소(exponentially decays)하는 학습 비율(learning rate)을 사용하였습니다.

'train()' 함수는 경사(gradient)를 계산하고 학습된 변수를 업데이트함으로써 목표를 최소화 하는데에 필요한 기능을 추가합니다 ( 자세한 사항은 GradientDescentOptimizer 참조). 이 함수는 하나의 이미지 배치(batch)에 대하여 모델을 훈련하고 업데이트 하는데 필요한 모든 연산을 실행하는 기능을 리턴해줍니다.
모델 실행 및 훈련 해보기
모델을 만들었으니, 이제 이 모델을 실행해보고 cifar10_train.py 스크립트를 사용하여 훈련 작업을 실행해봅시다.
python cifar10_train.py
참고: 여러분이 CIFAR-10 튜토리얼에서 처음 어떤 타겟을 실행하면, CIFAR-10 데이터셋이 자동으로 다운로드 됩니다. 데이터셋은 160MB 이하 입니다. 아마 그동안 당신은 커피 한 잔이 떠오를 지도 모릅니다.
출력을 보아야 합니다:
Filling queue with 20000 CIFAR images before starting to train. This will take a few minutes.
2015-11-04 11:45:45.927302: step 0, loss = 4.68 (2.0 examples/sec; 64.221 sec/batch)
2015-11-04 11:45:49.133065: step 10, loss = 4.66 (533.8 examples/sec; 0.240 sec/batch)
2015-11-04 11:45:51.397710: step 20, loss = 4.64 (597.4 examples/sec; 0.214 sec/batch)
2015-11-04 11:45:54.446850: step 30, loss = 4.62 (391.0 examples/sec; 0.327 sec/batch)
2015-11-04 11:45:57.152676: step 40, loss = 4.61 (430.2 examples/sec; 0.298 sec/batch)
2015-11-04 11:46:00.437717: step 50, loss = 4.59 (406.4 examples/sec; 0.315 sec/batch)
...
스크립트는 매 10단계마다 총 손실(total loss) 뿐만 아니라 데이터의 마지막 배치가 처리될 때의 처리속도도 보고합니다. 몇 가지 조언:
데이터의 첫 배치는 전처리 스레드가 20,000장의 처리된 CIFAR 이미지를 셔플링(shuffling) 큐에 채워넣는 만큼 지나치게 느릴 수 있습니다 (예를 들어, 수 분).
보고된 손실은 가장 최근 배치의 평균 손실입니다. 이 손실은 크로스 엔트로피의 합과 모든 가중치 감소(weight decay) 텀의 합임을 기억하세요.
배치 하나의 처리속도에 주목하세요. 위의 수치는 Tesla K40c로 얻은 값입니다. CPU에서 실행한다면, 좀더 느린 성능을 보일 것 입니다.
연습: 실험할 때, 훈련의 첫 스텝이 오랜 시간이 소요되는 것이 때때로 짜증날 수 있습니다. 초기에 큐를 채우는 이미지의 수를 줄여보세요.
cifar10.py에서NUM_EXAMPLES_PER_EPOCH_FOR_TRAIN을 검색해보세요.
cifar10_train.py는 주기적으로 모든 모델 파라미터를 체크포인트 파일(checkpoint files)에 저장합니다. 하지만 모델 자체를 평가하지는 않습니다. 체크포인트 파일은 cifar10_eval.py에서 예측 성능을 측정하는데에 사용됩니다.(아래에 있는 모델을 평가하기를 보세요).
이전 단계들을 모두 따라왔다면, 당신은 CIFAR-10 모델의 훈련을 시작한 것입니다! 축하합니다!
cifar10_train.py에서 리턴되는 terminal 텍스트는 모델을 어떻게 훈련할 것인지에 대한 최소한의 통찰(insight)을 제공합니다. 우리는 훈련하는 동안 모델에 대한 더욱 많은 통찰(insight)을 원합니다:
- 손실(loss)이 정말 감소하는지 혹은 단지 노이즈였는지?
- 모델이 적절한 이미지를 제공받는지?
- 경사(gradients), 활성화(activations), 그리고 가중치(weights)는 합당한지?
- 현재의 학습 비울(learning rate)는 무엇인지?
TensorBoard 는 기능적으로, cifar10_train.py의 SummaryWriter를 통해 주기적으로 데이터를 추출하여 표시합니다.
예를 들어, 우리는 훈련하는 동안 활성화(activation)의 분포와, local3 feature들의 희박함(sparsity)의 분포가 어떻게 진화(evolve) 하는지 볼 수 있습니다:

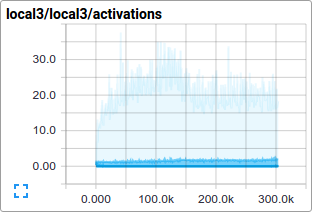
총 손실(total loss)뿐만 아니라, 개별적인 손실 함수(loss function) 들은 특히 시간 경과에 따라 흥미롭습니다. 그러나, 손실(loss)은 훈련에 사용되는 작은 배치 사이즈에 따라 상당히 많은 양의 노이즈를 나타냅니다. 이 연습에서 우리는 원본 값에 더하여 그들의 이동 평균을 시각화하는데 매우 유용함을 발견하였습니다. 이러한 목적을 위하여 어떻게 스크립트가 ExponentialMovingAverage를 사용하는지 보세요.
모델 평가하기
이제 남아있는 데이터 셋에 대하여 학습된 모델이 얼마나 잘 작동하는지 평가해봅시다. 모델은 cifar10_eval.py 스크립트에 의해 평가됩니다. 이 스크립트는 inference() 함수로 모델을 구축하고 CIFAR-10 평가 데이터셋에 있는 10,000장의 이미지를 사용하여 1에서의 정밀도(Precision at 1):가장 높은 예측값이 이미지의 실제 라벨과 얼마나 자주 일치 하는지를 계산합니다.
훈련하는 동안 모델이 어떻게 개선되는지 추적하기 위하여, cifar10_train.py가 생성하는 최근의 체크포인트 파일에서 평가 스크립트가 주기적으로 실행됩니다.
python cifar10_eval.py
같은 GPU에서 평가와 훈련 바이너리를 실행하지 않도록 주의하세요. 아마 메모리가 부족할 것입니다. 분리된 GPU에서 각각 실행하거나 같은 GPU에서 평가를 하는 동안에는 훈련을 잠시 중단하는 것을 고려하세요.
아래와 같은 결과를 보게 됩니다.
2015-11-06 08:30:44.391206: precision @ 1 = 0.860
...
스크립트는 주기적으로 오직 정밀도@1(precision@1)을 리턴합니다 -- 이 경우에는 86%의 정확도를 리턴하였습니다.
또한 cifar10_eval.py는 TensorBoard에서 시각화를 해볼 수 있는 요약(summaries)을 내보냅니다. 이 요약들은 평가를 하는 동안 모델에 대한 추가적인 이해를 제공합니다.
훈련 스크립트는 모든 학습된 변수의 이동평균(moving average) 버전을 계산합니다. 평가 스크립트는 모든 학습된 모델 파라미터를 이동 평균 버전으로 치환합니다. 이 치환은 평가시 모델 성능을 향상시킵니다.
연습: 평균 파라미터를 사용하는 것은 예측 성능을 정밀도 @ 1(precision @ 1)에서 약 3%정도 향상시킬 수 있습니다.
cifar10_eval.py를 수정하여 평균 파라미터를 사용하지 않도록 해보고 예측 성능이 떨어지는 것을 확인해보세요.
다중 GPU 카드를 사용하여 모델 훈련하기
최신 워크스테이션은 과학적인 계산을 위하여 다수의 GPU를 갖추고 있습니다. TensorFlow는 이러한 환경을 이용하여 다수의 GPU 카드에서 동시에 훈련 연산을 실행할 수 있습니다.
병렬로 모델을 훈련하려면, 훈련 과정을 분산된 방식으로 조직할 필요가 있습니다. 다음에 나오는 모델 복제본 이라는 용어는 데이터의 하위 집합으로 훈련한 모델의 복사본 중의 하나입니다.
단순하게 비동기(asynchronous) 모델 파라미터 업데이트를 적용하면 최선의 값에 비해 조금 떨어지는 차선의 훈련 성능을 얻을 수 있습니다. 독립된 모델 복제본은 오래된 모델 파라미터의 복사본으로 학습되어 있기 때문입니다. 반대로, 완전한 동기(synchronous) 업데이트의 경우는 가장 느린 모델 복제본 만큼 느릴 것 입니다.
다수의 GPU 카드를 갖춘 워크스테이션에서, 각각의 GPU는 비슷한 속도와 CIFAR-10 모델 전체를 실행할 만한 충분한 메모리를 탑재하고 있을 것입니다. 그러므로, 우리는 우리의 훈련 시스템을 디자인 하는데에 아래와 같은 규칙을 따릅니다:
- 각각의 GPU에 개별의 모델 복제본을 올립니다.
- 모든 GPU가 한 배치의 데이터를 처리 완료 할때까지 기다려 모델 파라미터 업데이트를 동기적으로 수행합니다.
이 모델의 다이어그램은 다음과 같습니다.
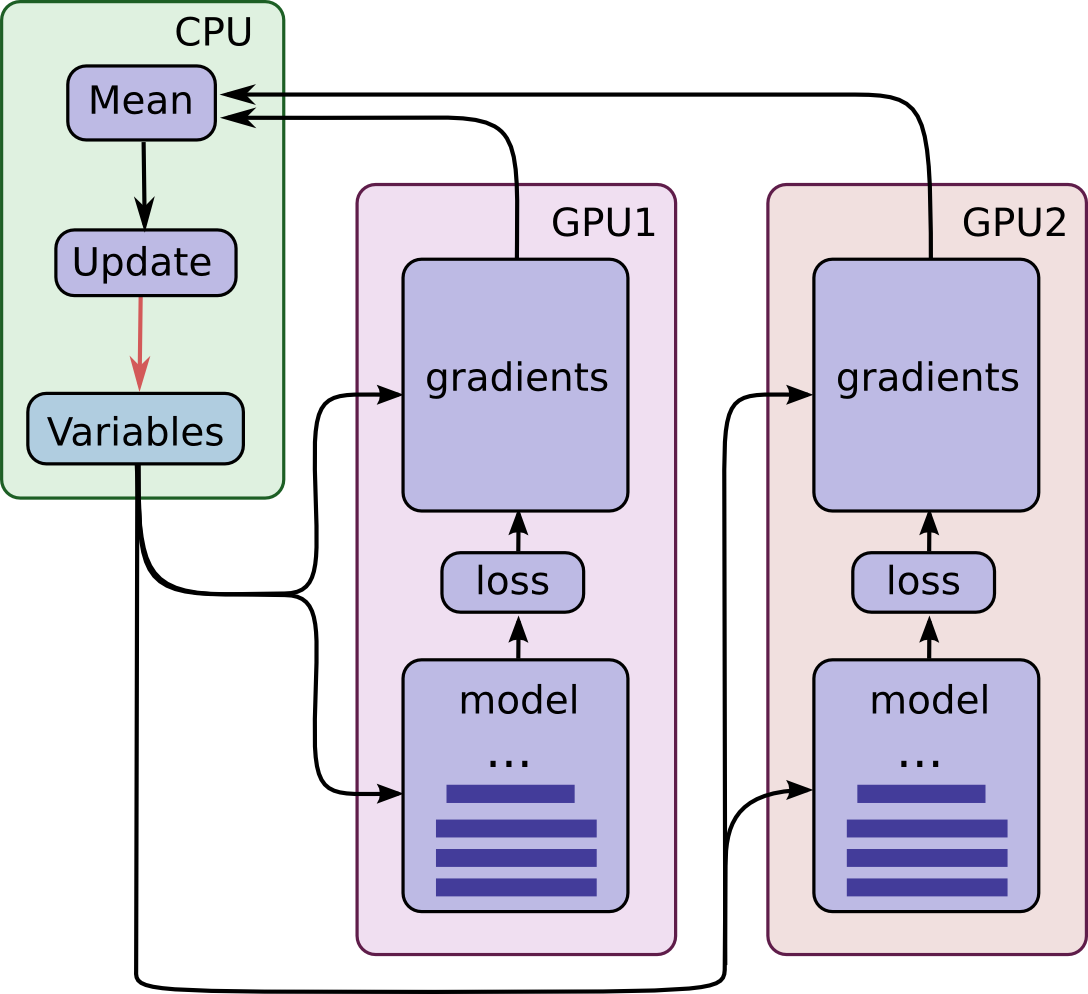
각각의 GPU는 추론(inference)뿐만 아니라 경사(gradients)도 독자적인 데이터 배치를 사용하여 계산한다는 것에 주의하세요. 이러한 설정은 GPU간의 더 큰 데이터 배치를 효과적으로 분배 할 수 있도록 해줍니다.
이러한 설정은 모든 GPU들이 모델 파라미터를 공유해야 합니다. GPU간의 데이터 전송이 꽤 느린 작업이라는 사실은 잘 알려져 있습니다. 이러한 이유로, 우리는 모든 모델 파라미터를 CPU 위에 저장하고 업데이트 하기로 정하였습니다(위의 그림에서 녹색 박스). 모든 GPU에서 새로운 데이터 배치가 처리 되고 난 뒤 갓 생성된 모델 파라미터의 집합은 각각의 GPU로 전송됩니다.
GPU들은 연산에 동기화되어있습니다. 모든 경사(gradients)를 GPU들로부터 축적하여 평균을 구합니다(녹색 박스를 보세요). 모델 파라미터는 모든 모델 복제본들의 경사(gradients)의 평균을 사용하여 업데이트됩니다.
장치에 변수와 연산 배치시키기
장치에 변수와 연산을 배치시키는 것은 조금 특별한 추상화(abstraction)가 필요합니다.
우리에게 필요한 첫번째 추상화는 단일 모델 복제본에 대한 추론(inference)과 경사(gradients)를 계산하기 위한 함수입니다. 코드에서 우리는 이 추상화를 "타워"라는 용어로 부릅니다. 우리는 각각의 타워에 두가지 속성을 설정해야 합니다:
타워 안의 모든 연산들에 대한 유일한 이름.
tf.name_scope()는 scope를 붙여 이런 유일한 이름을 제공합니다. 예를 들면, 첫번째 타워의 모든 연산들은tower_0가 앞에 붙습니다. e.g.tower_0/conv1/Conv2D.타워 안의 연산을 실행할 선호하는 하드웨어 장치.
tf.device()는 이를 특정해줍니다. 예를 들면, 첫번째 타워의 모든 연산들은device('/gpu:0')스코프 안에 존재하게 됩니다. 이는 해당 연산들을 첫번째 GPU에서 실행하라는 것을 나타냅니다.
모든 변수는 다중-GPU 버전에서 공유 되기 위하여 CPU에 고정되어있고, tf.get_variable()를 통하여 접근할 수 있습니다.
자세한 방법은 변수 공유하기(Sharing Variables)를 보세요.
다수의 GPU 카드에서 모델을 실행하고 훈련하기
만약 당신의 머신에 여러 대의 GPU 카드가 있다면 cifar10_multi_gpu_train 스크립트를 이용하여 모델을 좀더 빠르게 학습하는데 사용할 수 있습니다. 이 버전의 훈련 스크립트는 다수의 GPU 카드에 모델을 병렬화합니다.
python cifar10_multi_gpu_train.py --num_gpus=2
기본 GPU 카드 숫자는 1로 설정되어 있다는 것을 참고하세요. 추가적으로, 당신의 머신에 하나의 GPU만 사용가능하다면, 당신이 더욱 많은 GPU를 요청하더라도 모든 계산은 그 하나의 GPU에 위치하게 됩니다.
연습:
cifar10_train.py의 기본 설정은 128의 배치 크기로 실행 하는 것입니다. 64 배치 크기로 2대의 GPU를 사용하여cifar10_multi_gpu_train.py을 실행해보고 훈련 속도를 비교해보세요.
다음 단계
축하합니다! 당신은 CIFAR-10 튜토리얼을 완료하였습니다.
만약 지금 당신만의 이미지 분류 시스템을 개발하고 훈련하는 데에 흥미가 있다면, 이 튜토리얼을 포크(fork)하고 당신의 이미지 분류 문제에 맞춰 구성요소를 교체하는 것을 추천합니다.
연습: Street View House Numbers (SVHN) 데이터셋을 다운로드 하세요. CIFAR-10 튜토리얼을 포크(fork)하고 SVHN을 입력 데이터로 교체하세요. 예측 성능을 향상시키기 위하여 네트워크 아키텍쳐를 조정해보세요.